🕷️ Hexapod Simulator: 0.2.0-alpha.0
v0.2.0-alpha.0
My objective to build a hexapod robot simulator from first principles. I’ll be using solely homogenous transform matrix, and not quaternions. I’m aware that quaternions is inarguable the better solution if not the best, not only the elegant math, but the speed of calculation. My reason is that I’m not that familiar with quaternions. In the future, when I have time I’d study quaternions and reimplement the inverse kinematics.
You can currently check it out on on heroku but I highly suggest that you run it on your own local server. When this application is run locally it’s really snappy! On the other hand, the link above is barely usable. Here’s the repository containing the source code
Bare minimum
- I am able to install and run it on my laptop, or view it on the web.
- I could see the hexapod in a 3D plot.
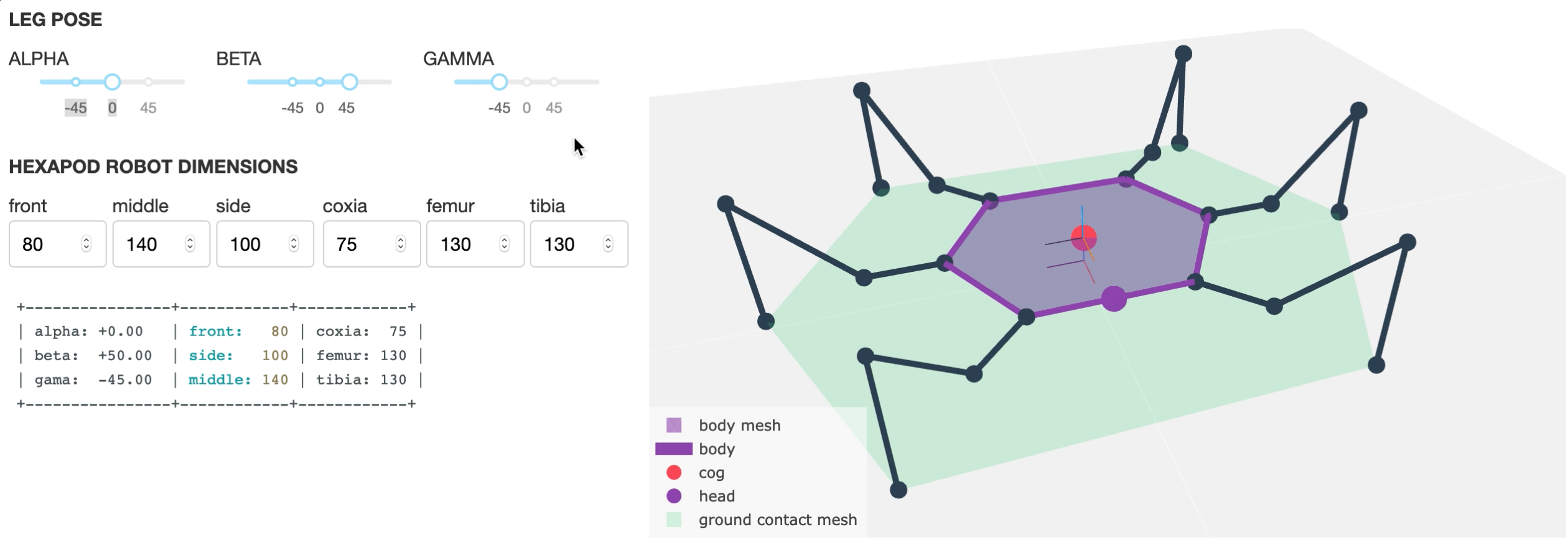
- I could specify the hexapod dimensions
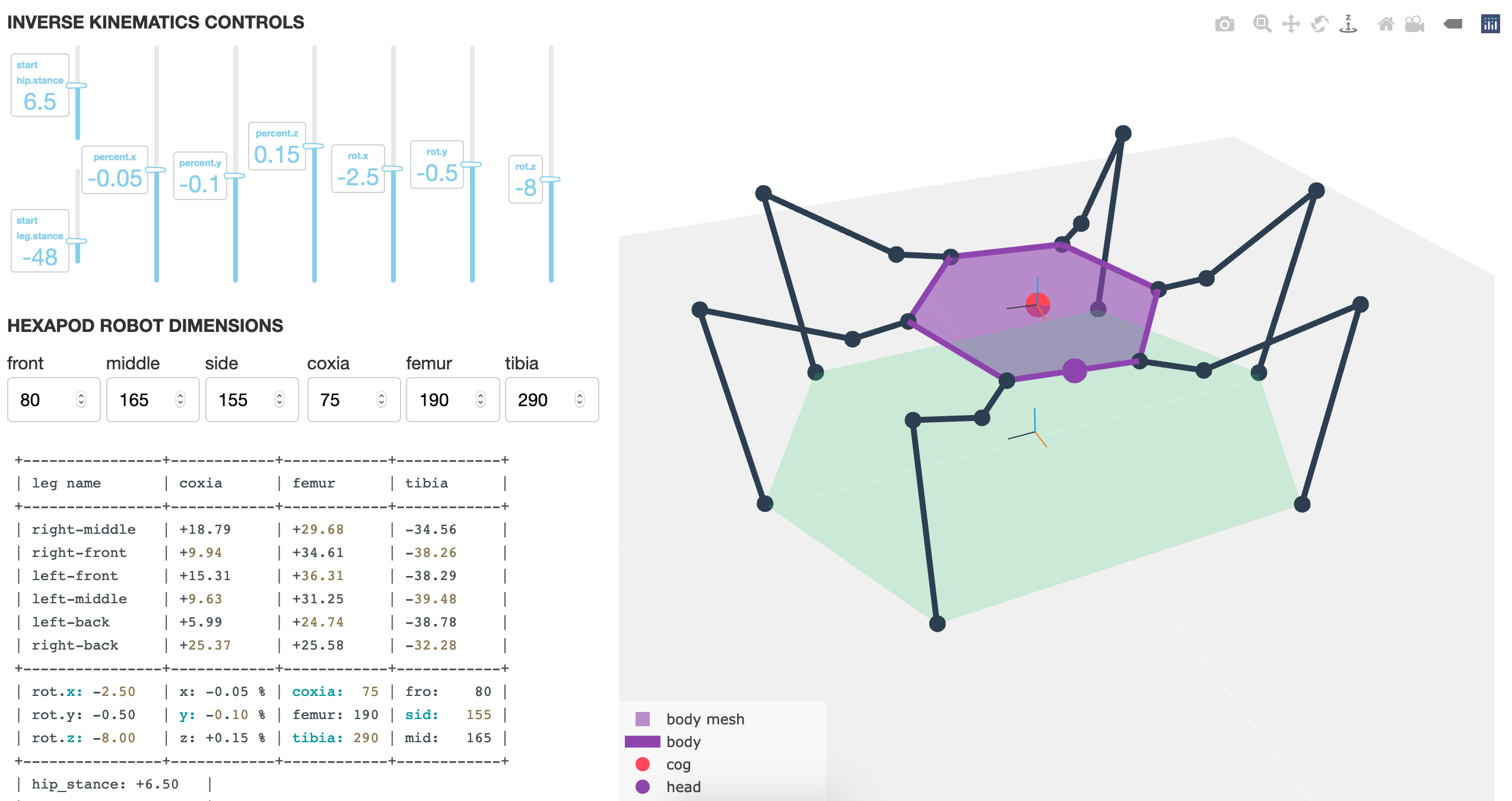
- Given the roll, pitch, yaw, translation of the body, foot positions, the corresponding 18 joint angles would be displayed.
I wanted to build something that, you know, just works. I decided it should be web browser-based. This is a hard and fast rule. It should have minimal dependencies, everything should be made simple, but not simpler.
| Twisting turning and tilting | Leg pattern movements | Customizing Hexapod Dimensions | Adjusting camera view |
|---|---|---|---|
 |
 |
 |
 |
What technology to use? Hmm
I needed a 3D graphing library that had a very low-learning curve.
I didn’t know anything about Javascript, is this finally the time I get to learn it? What is the easiest 3D plotting library that I could use? ThreeJs has a lot of features but it has a relatively steep learning curve. So is D3js. It would take me forever to implement it in WebGL.
I settled with using Plotly-Dash so I can quickly prototype it and not get bogged down by the details of plotting. I already know Python very well. And worst case, I could always use a different library in the future. The important thing is to be able to code the kinematics and inverse kinematics and have a visual feedback for every step of development.
My progress so far
Here’s a preview of how it works
 |
|---|
 |
Features
| Feature | Description |
|---|---|
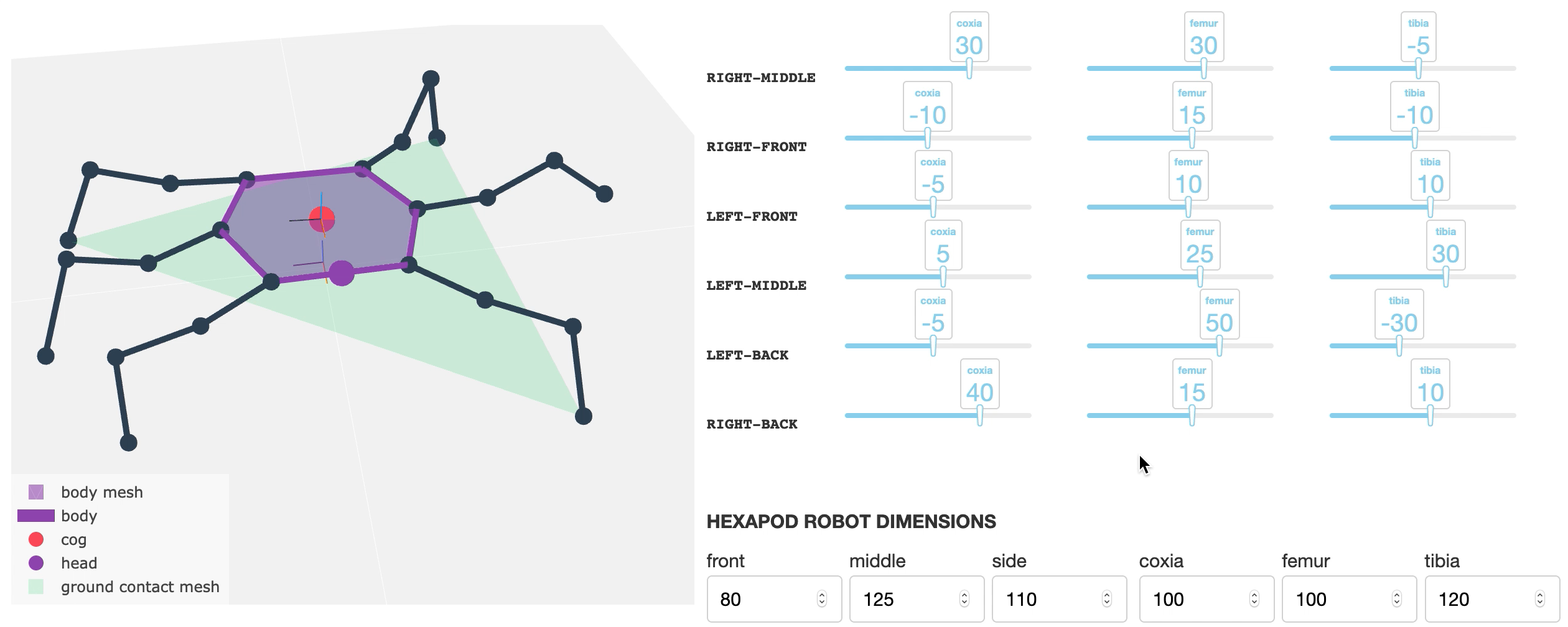
| 💕Forward Kinematics | Given angles of each joint, what does the robot look like? |
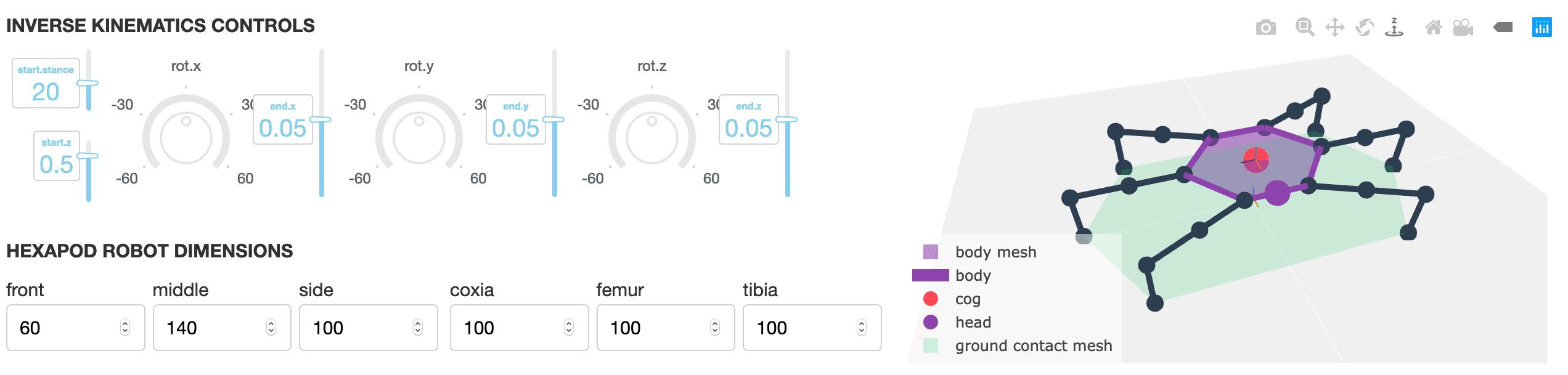
| 💕Inverse Kinematics | What are the angles of each joint to make the robot look the way I want? Is it even possible? Why or why not? |
| 💕Uniform Movements | If all of the legs behaved the same way, what will the robot look like? |
| 💕Customizability | Set the dimensions and shape of the robot’s body and legs. (6 parameters) |
| 💕Usability | Control the camera view, pan, tilt, zoom, whatever. |
| 💕Simplicity | Minimal dependencies. Only depends on Numpy for calculations. Plotly-dash for plotting, Plotly can be safely replaced if a better 3d plotting library is available |
| ❗ Stability Check (WIP) | If we pose the robot in a particular way, will it fall over? |
| ❗Fast | Okay, it’s not as fast as I wanted, but on a local server, it’s okay |
| ❗Bug-free | Okay, right now there’s still room for improvement |
| ❗Well-tested | Yeah, I need to build compile test cases first |
More screenshots
| Screenshots |
|---|
 |
 |
 |
 |